SPM/STM

Сканирующие зондовые микроскопы
Сканирующая зондовая микроскопия (SPM) - это группа методов, таких как сканирующая туннельная микроскопия (STM) и атомно-силовая микроскопия (AFM), которые используют зонд для взаимодействия с поверхностью образца. При двумерном сканировании поверхности образца зондом получается микроскопическое изображение с высоким разрешением.
Сканирующая зондовая микроскопия (SPM), особенно сканирующая туннельная микроскопия (STM) и бесконтактная атомно-силовая микроскопия (ncAFM) в сверхвысоком вакууме (UHV) или в определенных атмосферах, таких как близкое к атмосферному давление (NAP), позволяют получать изображения с высоким разрешением и проводить спектроскопию с атомарным разрешением.
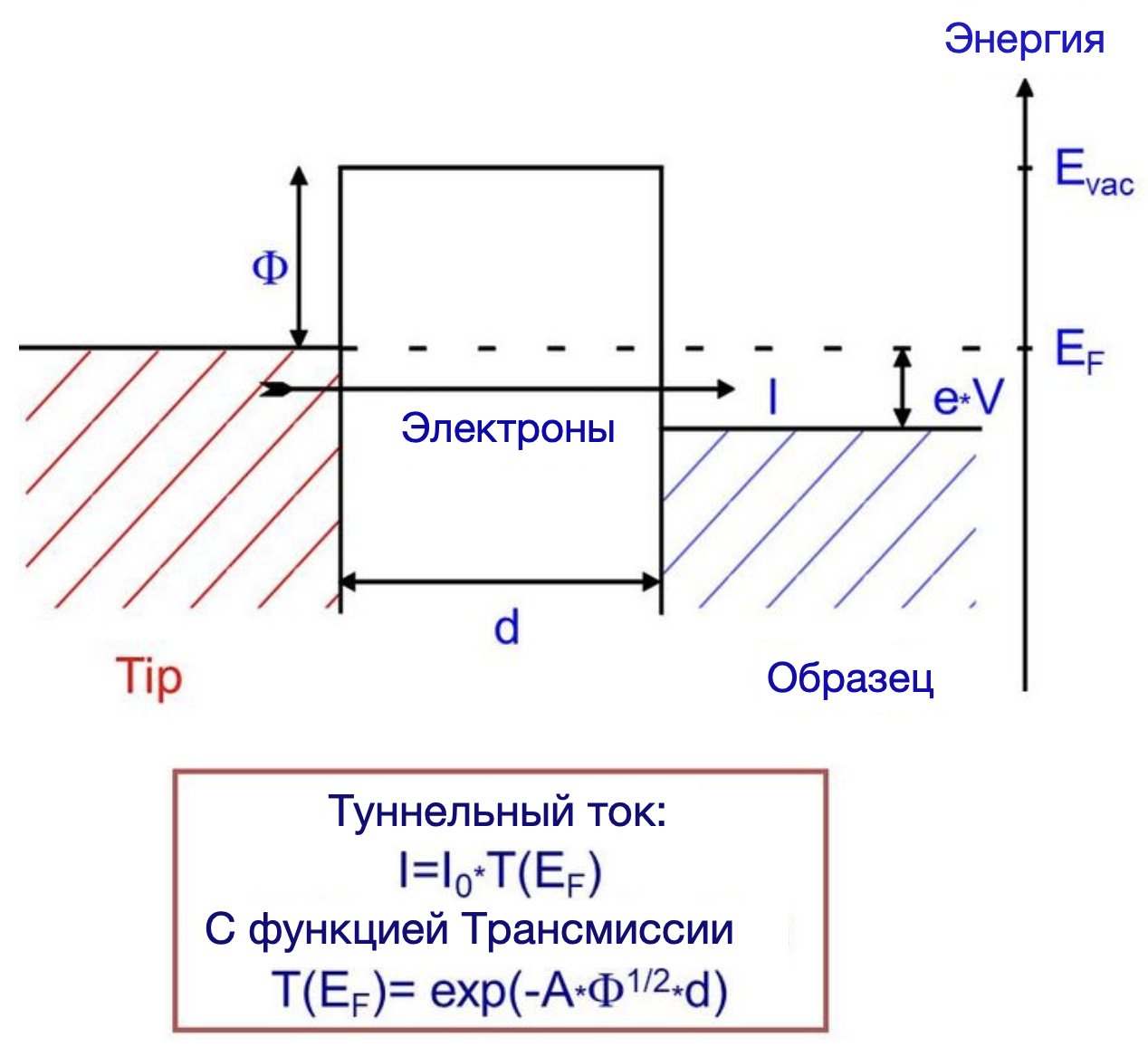
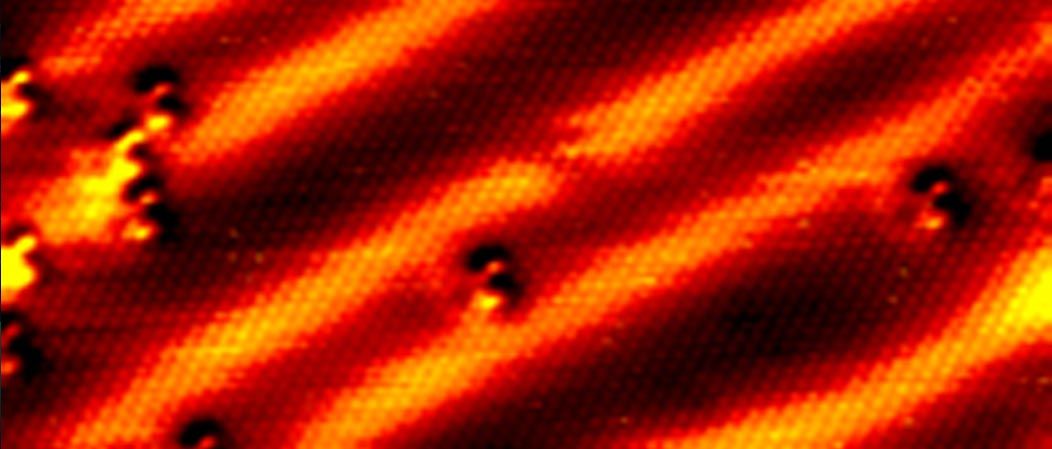
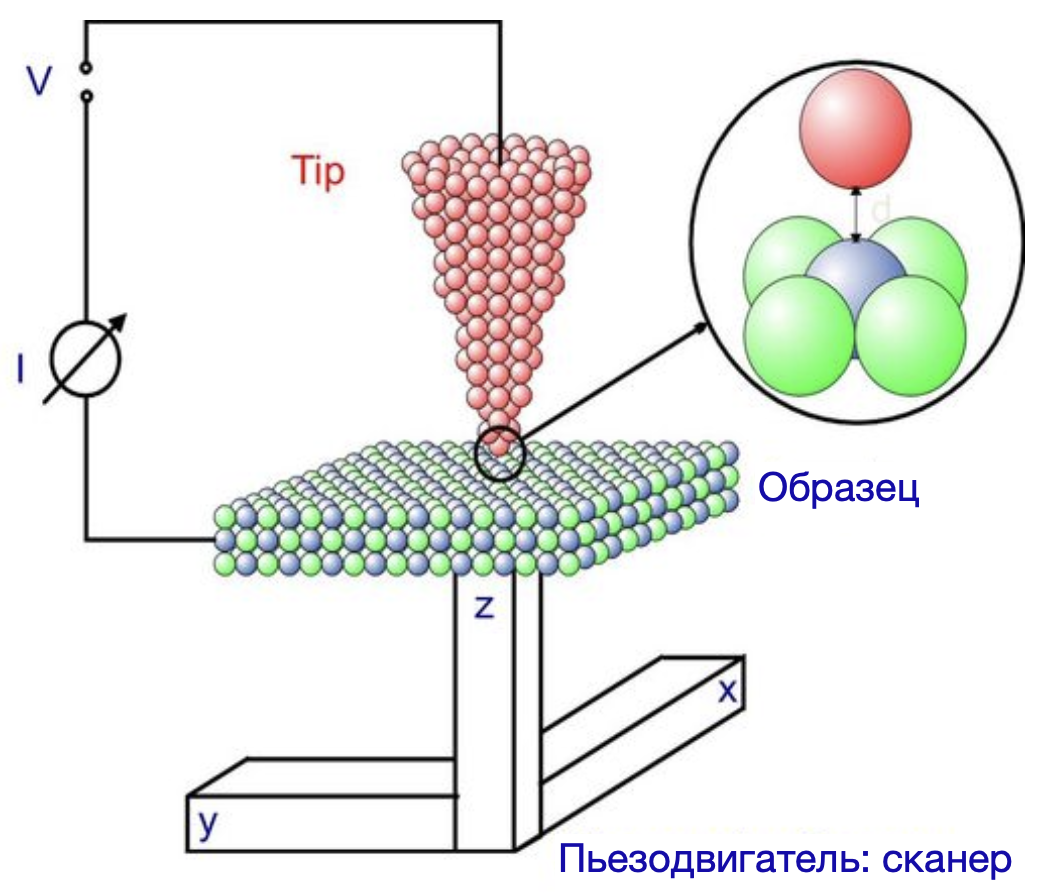
Сканирующая туннельная микроскопия (STM) позволяет отображать проводящие поверхности в нанометровом масштабе с использованием эффекта квантово-механического туннелирования. При этом острый металлический наконечник (STM tip) сканирует по поверхности на расстоянии, обычно составляющем около десятой доли нанометра. Напряжение смещения подается на переход, чтобы генерировать туннельный ток, который используется в качестве параметра обратной связи и поддерживается постоянным. В результате движения наконечник очерчивает вдоль направления сканирования профиль высоты, пропорциональный локальной плотности состояний (LDOS) поверхности. При построчном сканировании может быть восстановлена полная 3D-карта поверхности даже с атомарным разрешением. Благодаря потенциалу этого метода исследования Нобелевская премия по физике была присуждена Герду Биннингу и Генриху Рореру в 1986 году за разработку первого STM совместно с Эрнстом Руска. С помощью STM можно исследовать топографию поверхности, получая информацию о ее геометрической кристаллической структуре, ориентации адсорбатов и эффектах роста в реальном пространстве. Таким образом, он обеспечивает интуитивное понимание взаимодействий адсорбата с поверхностью, интерфейсных эффектов и, в целом, физики поверхностей с разрешением в атомарном масштабе. Для приближения наконечника к образцу и перемещения его вдоль интересующей области сканирования реализованы два разных подхода - оба основаны на пьезодвижении. Двигатель грубой очистки обеспечивает грубое приближение наконечника к поверхности, в то время как сканирующий пьезоэлемент отвечает за движение сканирования. После переноса объекта исследования на столик для образцов, наконечник приближают к поверхности образцов до тех пор, пока они не окажутся в зоне туннелирования. Во время этого процесса задача состоит в том, чтобы выполнить движение сближения на несколько миллиметров достаточно быстро и при этом остановить это движение с такой точностью, чтобы наконечник STM не повредил поверхность. Металлический наконечник с субатомной точностью перемещается по образцу с помощью пьезоэлемента. Стандартная конструкция сканирующего пьезоэлемента состоит из сканирующей трубки, внешний электрод которой разделен на четыре секции. Это обеспечивает боковое перемещение в направлениях +/- X и +/-Y с помощью импульсов напряжения, подаваемых на внешние электроды, и высокоточное вертикальное перемещение в направлении +/-z при подаче напряжения на внутренний электрод. Особое внимание следует уделять стабильности прибора. При исследовании образцов с субнанометровым разрешением внешние воздействия (например, вибрации или даже акустические шумы) не должны нарушать расстояние между образцами и чувствительными электронными устройствами. Следовательно, жесткость оборудования и виброизоляция являются ключевыми характеристиками STM. Туннельный ток, регистрируемый предусилителем тока, имеет интенсивность порядка наноампер. Таким образом, он очень чувствителен к помехам, и все сигнальные кабели должны быть экранированы.
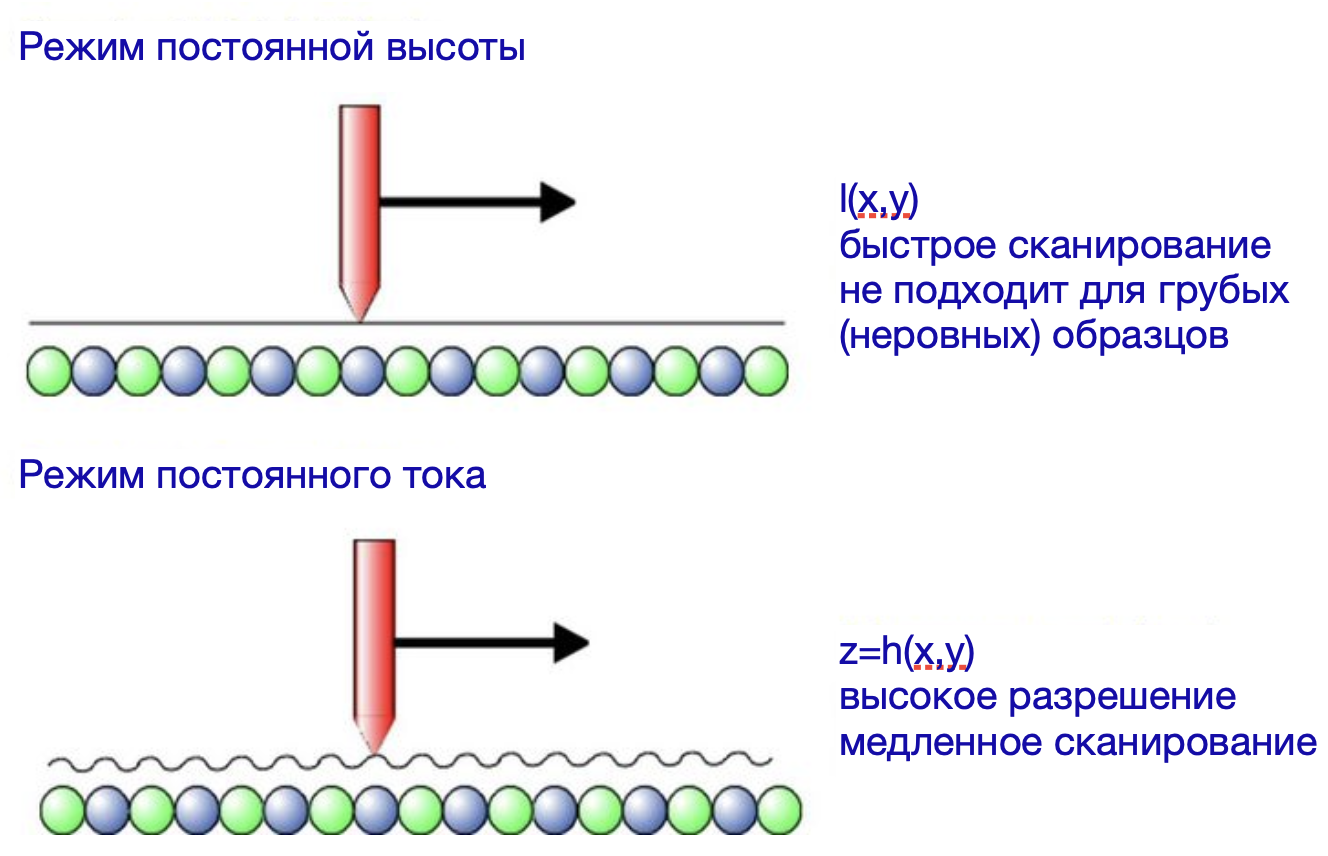
Контур обратной связи может быть реализован программно или аппаратно. Обычно он состоит из PI-контроллера (P: пропорциональный член, I: интегральный член или постоянная времени), где заданным значением является заданный туннельный ток (nA), а управляющим значением является Z-напряжение. С помощью PI-параметров чувствительность контроллера может быть настроена в соответствии со скоростью получения топографического изображения. Z-напряжение является мерой высоты от образца до положения наконечника. Это положение может быть зафиксировано при сканировании наконечником по поверхности пиксель за пикселем - линия за линией. Специальная калибровка системы определяет преобразование относительных пьезонапряжений в координаты X,Y,Z в нм масштабе. Построение координат Z для каждой пары координат X,Y в неправильном цветовом представлении визуализирует топографию поверхности. При очень стабильных условиях (отсутствие дрейфа/скрипа пьезоэлемента) и, как правило, на очень небольших участках сканирования вышеупомянутый контур обратной связи может быть отключен. В этом режиме, известном как измерение постоянной высоты, текущий сигнал может отображаться непосредственно в зависимости от координат X и Y.
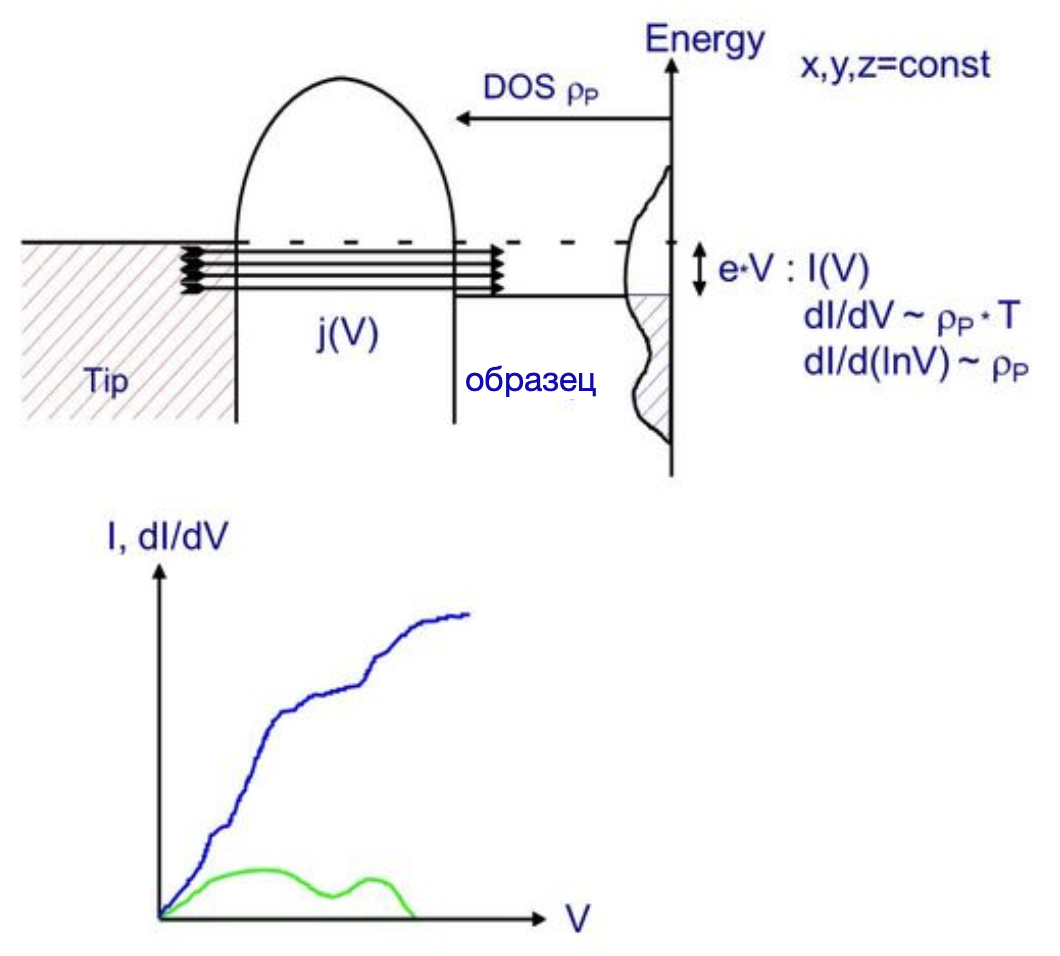
Локальная плотность состояний (LDOS) поверхности образца и адсорбатов может быть измерена с помощью STM-спектроскопии с субмолекулярным разрешением. Существует несколько спектроскопических методов в зависимости от того, как регистрируются три доступных сигнала, т.е. туннельный ток (I), напряжение смещения на поверхности наконечника (V) и расстояние между наконечником и поверхностью (z). Наиболее распространенный метод спектроскопии для отображения локальной плотности состояний (LDOS) фиксирует z и записывает I, одновременно увеличивая V через занятое (образец при отрицательном напряжении) и незанятое (образец при положительном напряжении) состояния образца. Производная от текущего сигнала (dI/dV) может быть получена методами модуляционной синхронизации и обеспечивает LDOS. При одновременной записи сигнала STS в нормальную топографию вклад LDOS в проводимость при заданном напряжении может быть визуализирован в цветовом представлении, отображающем двумерное локальное распределение занятых/незанятых состояний при заданном напряжении (энергии). Комбинация STM и STS реализуется путем записи I-V спектра STS в каждом пикселе изображения STM постоянной высоты. В результате получается трехмерный набор данных, где отдельные слои представляют топографические изображения в заданных состояниях занятости.
С современными динамическими датчиками, возможна статическая и динамическая STM, в то же время сигнал ncAFM может регистрироваться параллельно, поскольку сдвиг частоты вблизи поверхности образца является мерой силы, действующей на наконечник.
